



Description
माप वस्तु की सतह और आकार के आधार पर, 2 संभावित तरीकों में से एक (A/B) एसेम्बली और स्क्रू पर दबाव रॉड M5 के लिए " दबाव रॉड M5 ' के लिए दबाव R5 के दबाव के बल पर 8.004 के दबाव की छड़ी पर. यह भी टोपी को एक टिप से बचाने के लिए आसान है या एक माप सतह की रक्षा करने के लिए टोपी (2 छवियों) के फ्लैट पक्ष पर एक खुद के चिपकने वाले संरक्षक को गोंद के लिए.
 
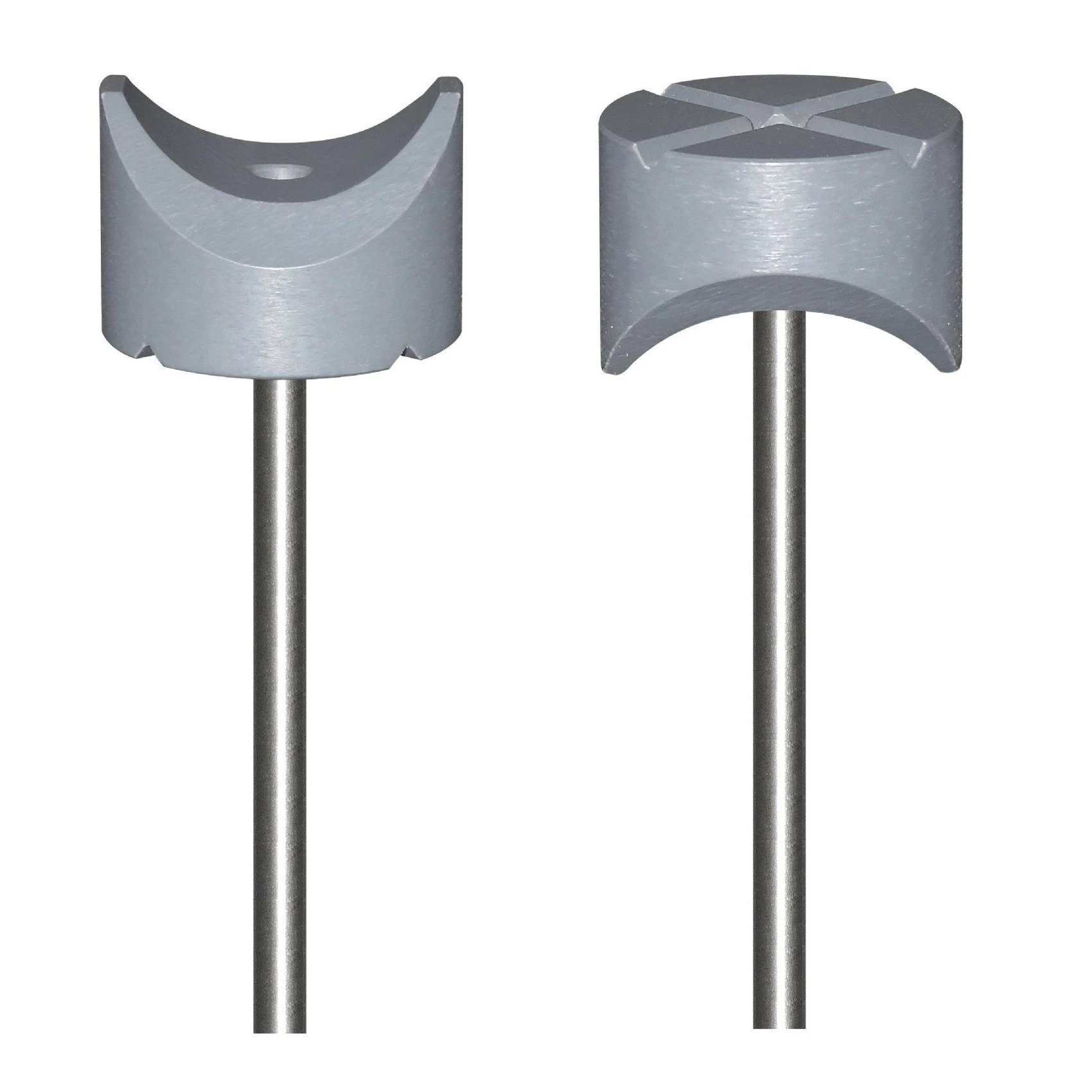
A: शंकु के माप की ओर इंगित करने वाले दो पक्षों के साथ एक-गुफा का आकार
- गोल वस्तुओं पर दबाव बलों को मापने के लिए डिज़ाइन किया गया है बिना फिसलने के.
- 2 किनारों, एक 90 बढ़ कोण का निर्माण, पुनर्प्रवेशी किनारों में दबाव बलों को मापने के लिए काम करते हैं.
अनुप्रयोग
- दहशत या आग के दरवाजे (इमरजेंसी एक्टर) की सलाखों पर दबाव मापन.
- दरवाजे के हैंडल की सुरक्षा का उपाय करें ।
- आग बुझाने के लिए दरवाजे, खिड़कियां, फ्रेम आदि को बंद करना आदि ।
बी: गोल, समतल और दो वी के आकार के अंतराल जो माप वस्तु की ओर इशारा करते हैं ।
- फ्लैट वस्तुओं पर दबाव बलों को मापने के लिए उपयुक्त.
- वी के आकार के अंतरों में एक प्रक्षिप्त किनारों पर दबाव बलों को मापने का काम किया जाता है ।
 
सर्वश्रेष्ठ माप परिणाम के लिए नोट
सामान्य PESOL/स्केल्स में बहुत ही सही उपाय है. हालांकि अधिकतम बलों मापन के लिए ऑपरेशन का तरीका परिणाम पर उल्लेखनीय प्रभाव पड़ सकता है। कृपया निम्नलिखित का पालन करें:
 
- दबाव मापन के लिए स्केल रूपांतरित करें.
- दबाव रॉड M5 '(R5') के लिए एक उपयुक्त दिशा में आगे बढ़ने के लिए, एक ' कैप को पूरी तरह से कस न दें । इस तरह से आप गोल या वर्गाकार वस्तु को मापने के लिए फिट करने के लिए इसे थोड़ा बारी से बारी कर सकते हैं.
- स्थिति को मापने में स्केल रखें, बिना किसी बल का निष्पादन किए बिना और टैन पेंच के साथ शून्य स्थिति को समायोजित करें.
- ड्रैग प्वाइंटर को शून्य की ओर ले जाएँ.
- रेडियल पकड़ पर स्केल रखें, दूसरा हाथ नली के विपरीत अंत को धारण करता है, इसे स्थिर कर देता है। मापन के दौरान ड्रैग प्वाइंटर को स्पर्श या बाधा न करें ।
- दाब मापन प्रारंभ करें. संभावित आंतरिक घर्षण को कम से कम करने के लिए माप ऑब्जेक्ट के लिए माप ऑब्जेक्ट के अक्ष को बनाए रखें.
- धीरे-धीरे और लगातार दबाव बढ़ा। तुलनीय परिणाम प्राप्त करने के लिए अक्षीय फीड की गति को बनाए रखना महत्वपूर्ण है ।
उदाहरण के लिए बहुत तीव्र अक्षीय फीड = > उच्चतर मापक परिणाम ।
जैसे बहुत धीमी अक्षीय फीड = > कम माप परिणाम
इसलिए हम एक औसत स्थिर गति पर माप बल का निर्माण करने की सिफारिश करें:
सो, अगर आप बल को कुल स्केल क्षमता के 1/5 से ऊपर उठाते हैं, या तो स्नातक की कुल लम्बाई का 1/5 भाग लेते हैं) ... 23 (एक और सेकंड के भीतर एक ही लंबाई के एक आगे के चरण के द्वारा बल को उठाया)... (और इतने आगे) 'अपने' शरीर 'के लिए' अपने 'के' '' के लिए 'अपने' पिण्ड 'के लिए तब तक' अपने 'पिण्ड' के लिए तब तक 'अपने' पिण्ड 'के लिए' अपने 'पिण्ड' के लिए 'अपने' पिण्ड 'के लिए' अपने 'पिण्ड' के लिए 'अपने' पि अधिकतम बल के इस पल में खींचें संकेतक अभी भी खड़ा है). - शून्य में वापस बल को कम करें, ड्रैग प्वाइंटर को छू नहीं रहा है.
- खींचें संकेतक के ऊपरी किनारे पर मापन की अधिकतम शक्ति पढ़ें.
- 3 बार के लिए एक ही पैरामीटर के साथ माप दोहराएँ और मूल्यों को दस्तावेज़.
- 3 मूल्यों की अंकगणितीय औसत विश्वसनीय परिणाम प्रदान करता है.
 
| तकनीकी आंकड़े | |
| आइटम नहीं. | 8.032 |
| सामग्री | पीवीसी गहरा धूसर |
| बाहर और भीतरी दौर, ऊंचाई के बाहर | √लो 32mm, 22.5 मिमी |
| लड़ी | M5-मेक्रो-लाइन के दबाव-सेट 8.004 के दबाव रॉड-फिट बैठता है |
| सामग्री हेक्स नट एम5 | जिंक प्लाटेड स्टील |
| निवल भार | 17.5 ग्राम |
| सकल भार | 19.0 ग्राम |
| पैकेजिंग इकाई | 1 pc |
| कोड EAN13 | 7612348080328 |
| कस्टम टारनेल | 8423.9092 |
| मूल देश | स्विट्जरलैंड (CH) |
| आवेदन: इमारतों में सुरक्षा |  |
Estimate shipping